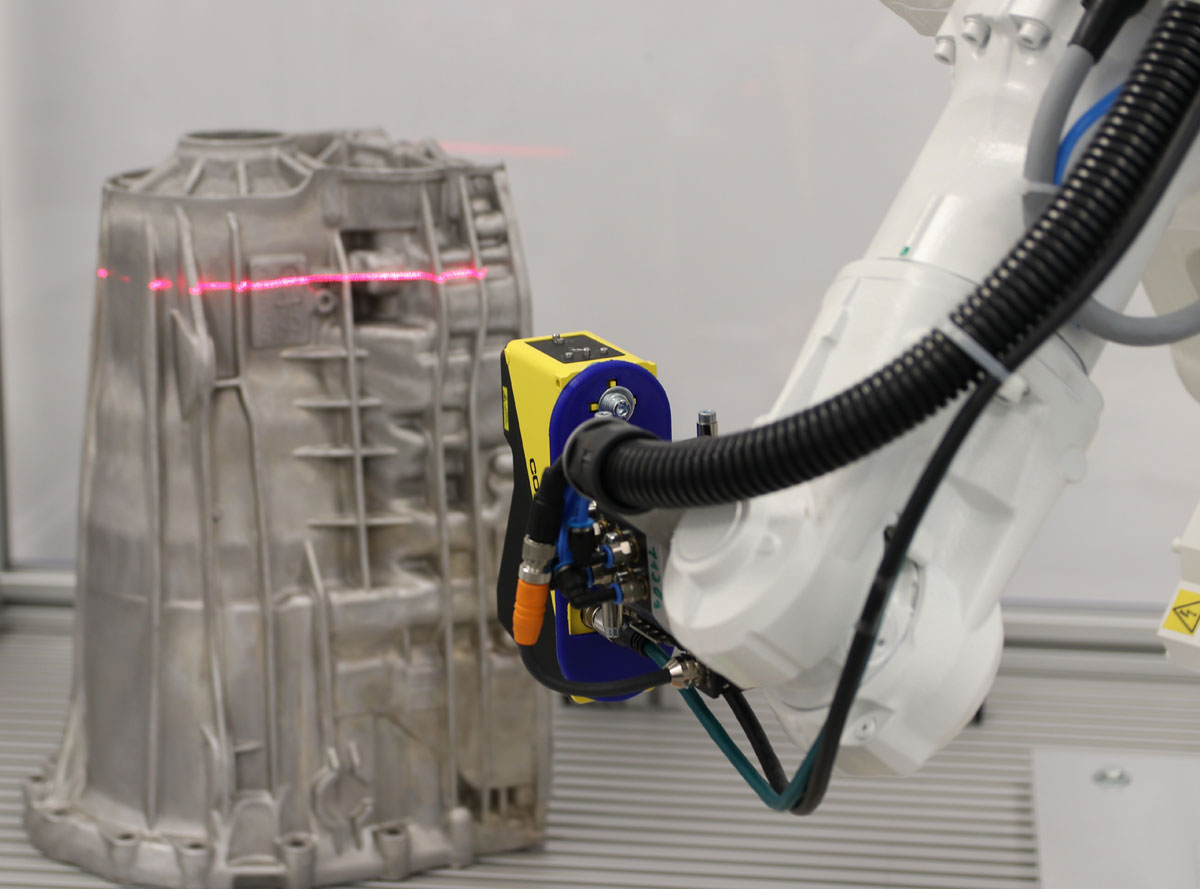
To create 3D images with a Cognex DS1000 reading head, the sensor must scan the image object. Image evaluation and programming of the DS1000 is performed in the Cognex Designer IDE with VisionPro tools. The IDE is integrated in the VC5 controller. It is irrelevant whether the workpiece is moving along the sensor or the sensor is moving along the workpiece. This is mainly implemented by one of the following four options:
A robot moves the workpiece past the reading head at constant speed. The resulting line cuts are combined to form a three-dimensional image.
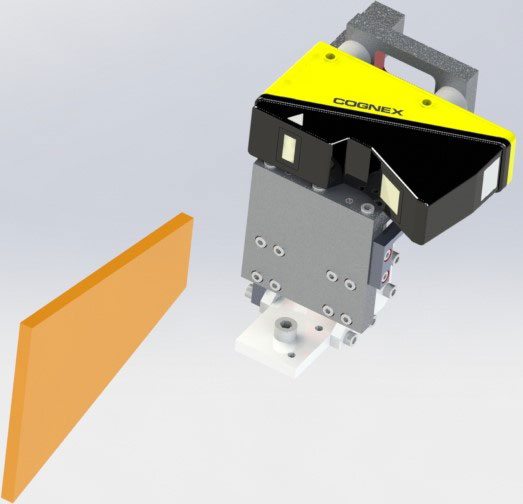
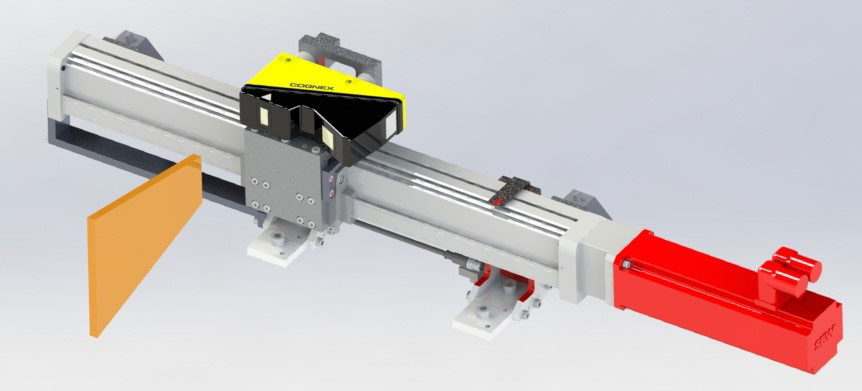
With this option, the DS1000 sensor is guided along the workpiece. This design is suitable as soon as workpieces are available for the sensor at defined positions. The starting point of the pick-up is specified by an inductive proximity switch on the linear axis. An encoder on the linear axis determines the position and the increments of the image capturing. The linear axis can be driven pneumatically or by a servo motor. While the pneumatic version is a cost-effective way of positioning, positioning by servo axis offers flexible starting and end points. Our experts gladly advise you on which option is right for you.
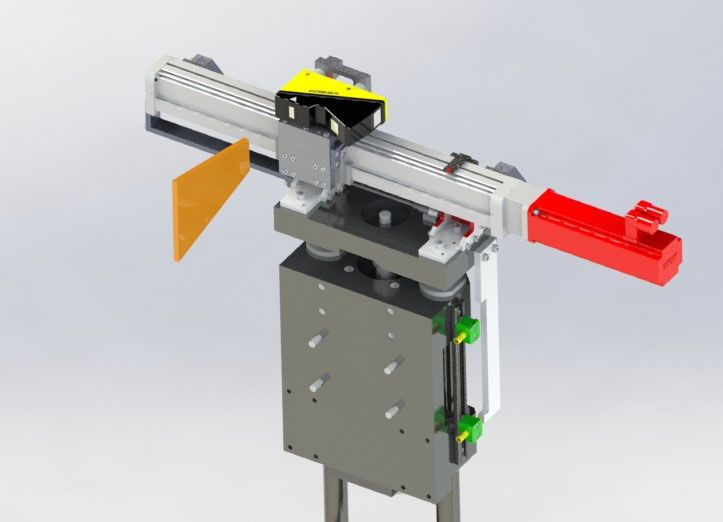
This option extends the possibilities of a linear guided profile sensor by a Z-axis. An exemplary application for this is the reading of different plain text fields at different heights. The read-out plain text can then be converted into a data matrix code and marked on the component. We gladly offer you a complete solution for the marking of the created DMC, adapted to your requirements.
This version represents the optimum in flexibility. Recording 3D images is not limited to a specific workpiece or a specific position, but can be applied universally to any product due to the robot’s approach paths. Thus, neither changed code placements nor new product types and models pose a problem. We supply the entire image processing and robot technology.